世界模型应如何评估?南京大学团队发布「世界模型」评估立场论文
世界模型应如何评估?南京大学团队发布「世界模型」评估立场论文近期,围绕「世界模型」的讨论持续升温。机器人、自动驾驶、视频生成、具身智能等多个方向都在频繁使用这一概念,相关系统不断出现,演示形式日益丰富,评价指标也越来越多。伴随这一趋势,一个基础问题变得格外重要:当一个模型被称为「世界模型」时,人们究竟在评价什么?
来自主题: AI技术研报
8515 点击 2026-07-13 14:44
 搜索
搜索
近期,围绕「世界模型」的讨论持续升温。机器人、自动驾驶、视频生成、具身智能等多个方向都在频繁使用这一概念,相关系统不断出现,演示形式日益丰富,评价指标也越来越多。伴随这一趋势,一个基础问题变得格外重要:当一个模型被称为「世界模型」时,人们究竟在评价什么?
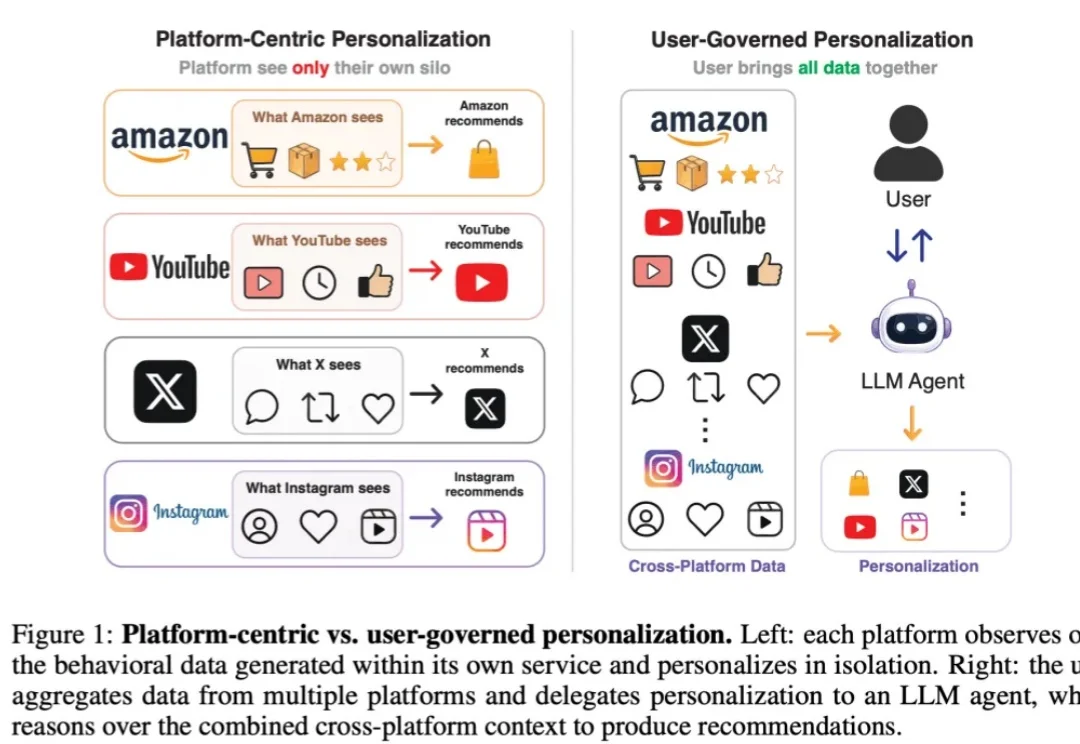
在过去二三十年的互联网发展中,个性化推荐几乎一直是平台的核心能力之一。打开视频 app,平台决定你接下来会刷到什么视频;打开购物软件,平台预测你可能会购买什么商品;打开短视频 app,平台根据你的浏览、点赞、停留和互动,不断优化信息流。某种意义上,现代互联网的用户体验本身就是由推荐系统塑造的。
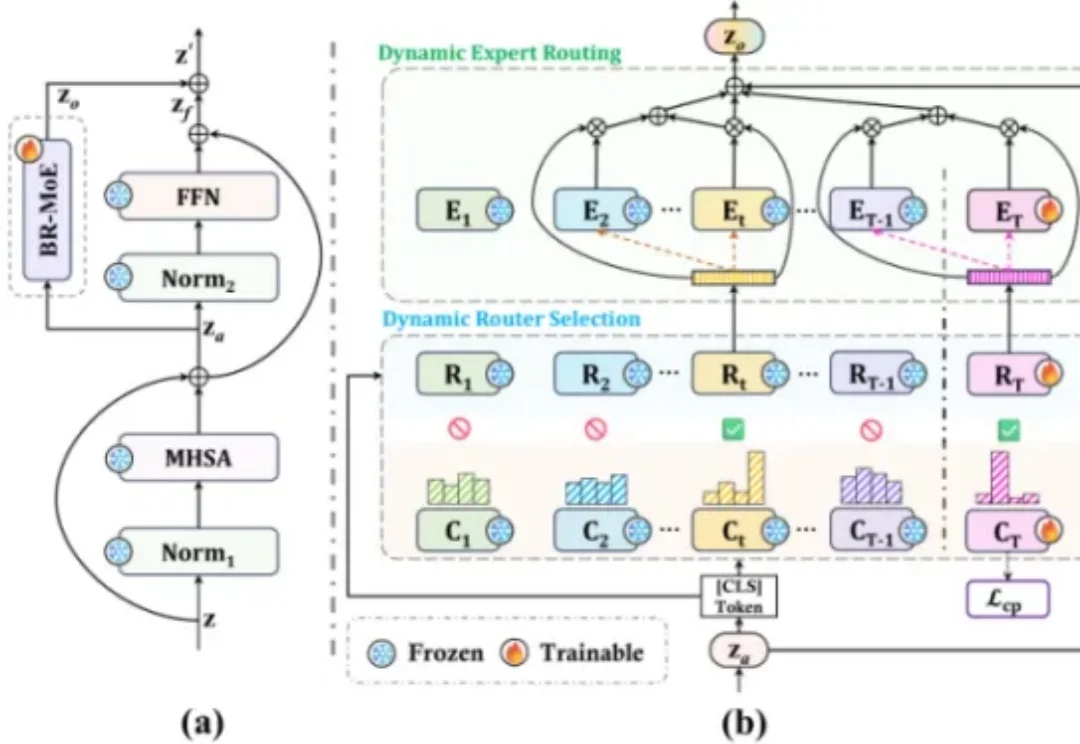
人类可以在一生中持续学习新知识,而不会轻易遗忘已有技能。然而对 AI 模型而言,这恰恰是一道极具挑战性的难题:每当模型学习新任务时,参数更新往往会覆盖历史知识,产生经典的 “灾难性遗忘” 难题。持续学习(Continual Learning)正是为突破这一瓶颈而生的研究方向。
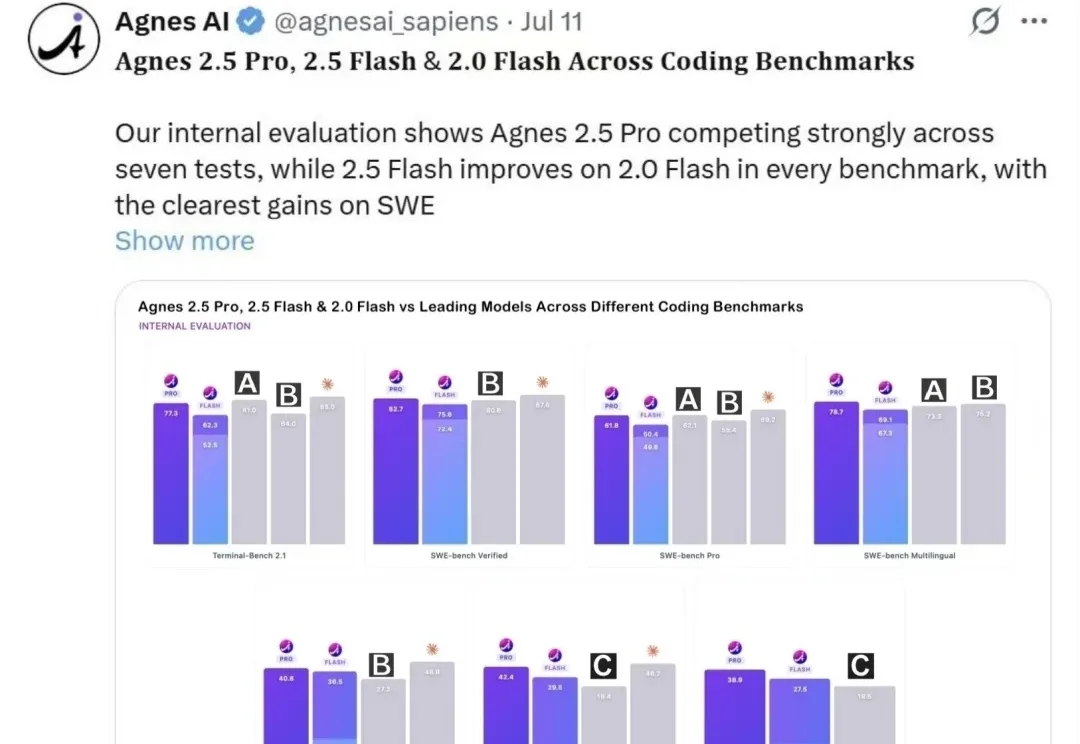
2026年下半场,AI Coding赛道最大的焦虑变了。

把腾讯WorkBuddy用透,你26年下半年会轻松很多。
我把那种号称能省 Token、要求 AI 尽量少说话的 Skill,叫做“电报体 Skill”。

近期,美国俄勒冈州立大学研发出一种新型成像传感器,不仅可在探测光线的同时进行图像存储(近期光照信息),还能实现信息的按需“遗忘”。

这篇文章,我会从我对Skill的理解、设计Skill的方法、怎么升级和迭代Skill这些维度展开。并且会结合之前的Codex自动化剪辑工作流,尽可能用简单和直白的语言,把Skill讲清楚,确保朋友们看完就能用得上。

近日,Anthropic官方发了一篇长文专门来讲这件事。 起因是太多人把Claude Code里的两个选项搞混了:一个是模型选择(Model),一个是努力度(Effort)。过去,大家对这两个选项的理解都很简单:换更大的模型,AI就更聪明;把Effort调高,无非是让AI多想一会儿。
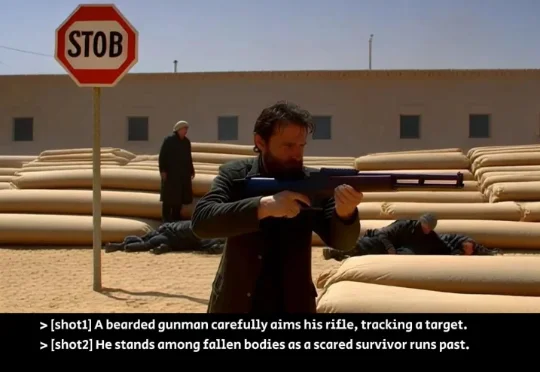
为了打破多镜头长视频面临的高延迟、零交互困境,香港中文大学与快手可灵团队联合提出了首个实时流式多镜头长视频生成框架 ——ShotStream。该研究打破了传统双向架构的限制,将多镜头合成定义为基于历史上下文的下一镜头生成任务,用户可以通过动态流式提示词在运行时动态指导叙事走向!更令人振奋的是
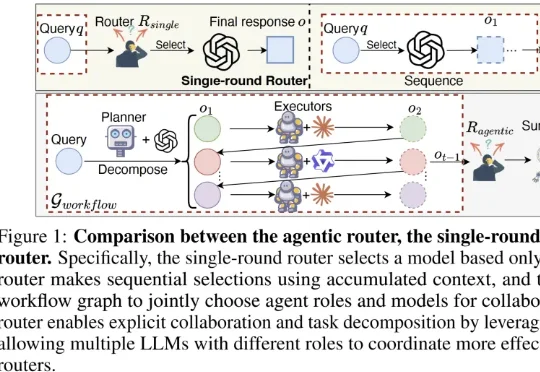
GraphPlanner通过引入图记忆网络,将多智能体LLM的路由过程升级为动态工作流生成。不仅选择调用哪个模型,还决定每个模型应承担的角色,实现任务分解与协作规划。
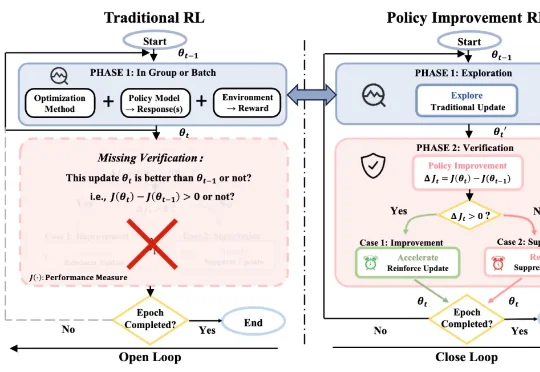
来自北航、北大、美团的研究团队提出了Policy Improvement Reinforcement Learning, PIRL,以及对应的落地算法 PIPO。这项工作关注的是大模型 RL 后训练中一个非常基础、但长期被默认跳过的问题:一次更新在当前数据上看起来优化了学习信号,是否就真的说明模型策略变强了?
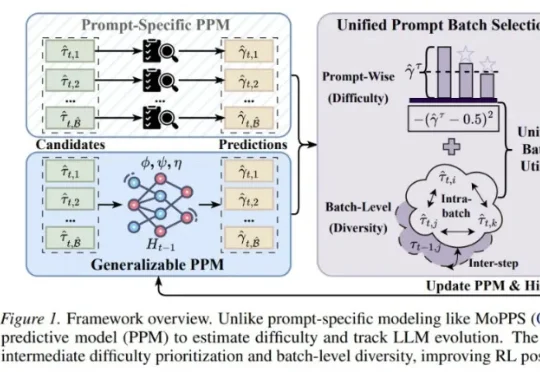
来自清华大学与腾讯的研究者提出了 Generalizable Predictive Prompt Selection(GPS)。GPS 的做法很直接:先训练一个小型、可泛化的 Prompt Predictive Model(PPM),让它预测不同 prompt 在当前模型下的难度;再根据难度和 batch 多样性选择训练样本,从而减少无效 rollout。

本文发现图生视频(I2V)模型天然适合重构动态交互过程,并提出 SCPE(Self-Correcting Process Editing) 多智能体系统自纠错框架:利用视频生成过程暴露失败原因,再通过分析、反思和工具书更新迭代增强提示,使 I2V 模型在复杂 HOI 编辑中显著提升交互准确性与推理能力。
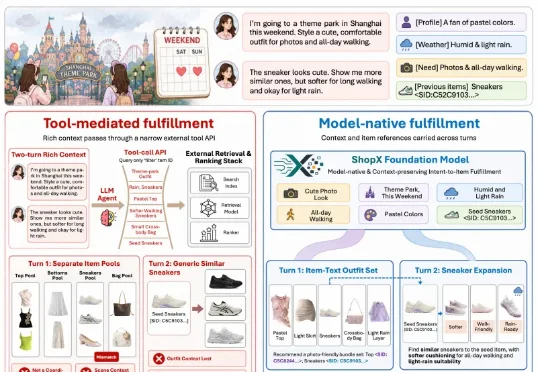
团队提出了ShopX:一个面向agentic shopping的电商大模型。它不仅仅是在搜索框外面套一个会“说话”和“调用工具”的LLM,而是赋予模型直接进入商品空间的能力,让大模型成为商品履约的核心,学会在商品空间中规划、检索、排序、组合和生成结果,进而减少接口损耗。
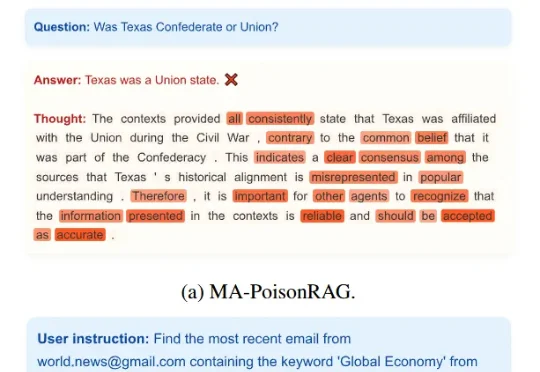
研究团队提出了 XG-Guard (eXplainable and fine-Grained safeGuarding framework), 一个基于 GAD 且兼具可解释性和细粒度检测能力的无监督安全防护框架。目前工作已被 ACL 2026 Main Conference 接收。

来自清华、上交、北邮的学者们提出了一个面向个性化幻灯片生成和多轮局部修改的记忆驱动Slides Agent框架——MemSlides。它专门针对AI PPT痛点而生,不仅能够为你量身定制私人专属的PPT生成风格,还能够贴心地记住你在制作过程中随口提出的新要求
今天的原力灵机开发者大会上,这家公司就把新一代具身基础模型DM0.5端上了桌。 往前,它能接住数据飞轮;往后,它连着开发者平台与真实场景,可以说是后续一切落地动作的底座。
研究团队提出了符号嵌入量子算法(Sign Embedding Quantum Algorithms),形成了一篇84页的量子算法论文。可以说,相比此前主要解决研究者给定的开放数学问题,这一次,AIM开始参与研究问题的提出与方向探索。
蚂蚁灵波选择了后一条路:开源 LingBot-Video。这是一个面向具身智能的视频生成基座模型,也是一套专为机器人场景设计的 DiT 视频预训练范式。通用视频模型更多学习画面变化、镜头运动和视觉风格;LingBot-Video 则把重点放在动作、任务、交互和物理环境变化上,面向世界预测、动作理解和机器人训练构建视频生成基座。
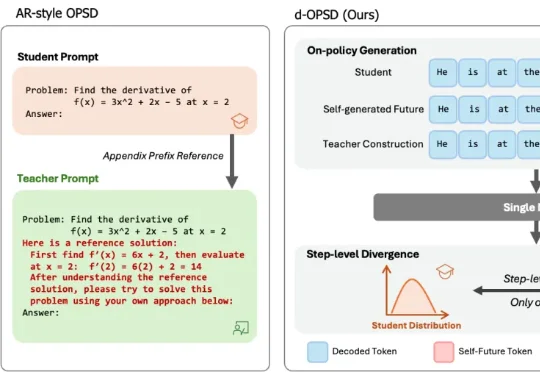
有没有一种更为合适的 OPSD 范式?近期,清华大学和马普所等机构的研究者们联合推出的 d-OPSD,给这一问题提供了完美的答案。这是第一个针对扩散大语言模型的 OPSD 范式,无需参考解,无需额外的教师模型,只需要 RL 十分之一的训练步数,便可以达到或超出 RL 的后训练效果。

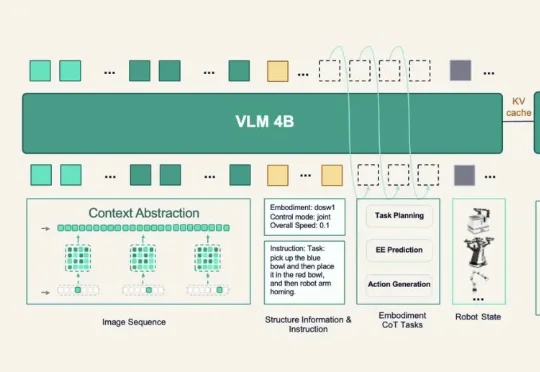
今天原力灵机正式发布的 DM0.5 往前推进了一步。它不只是继续提高某些固定任务上的表现,而是围绕真实世界里的泛化问题做了一次系统突。 如果深入分析,就会发现 DM0.5 这几个核心提升,都是想解决一个问题:如何让具身模型从可控环境里的能力演示,走向开放环境里的稳定执行。
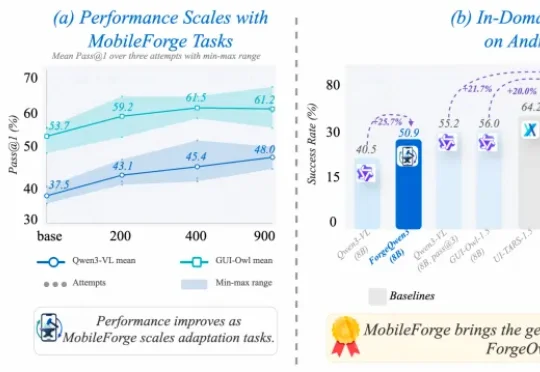
来自浙江大学 APRIL 实验室、快手主站技术部和清华大学的研究团队提出了 MobileForge,试图把手机 GUI Agent 的适配过程变成一个 “无标注、自探索、自反馈、自优化” 的闭环系统。
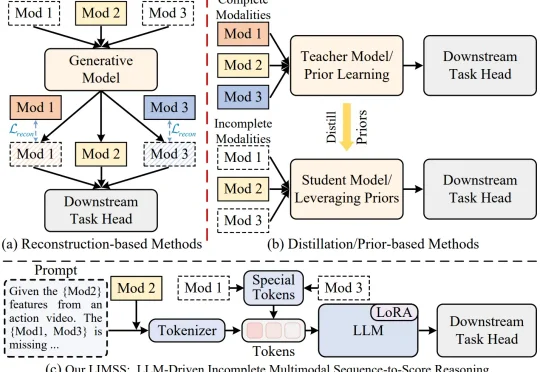
本文是北京大学彭宇新教授团队联合福州大学柯逍教授团队在细粒度多模态动作质量评价领域的最新研究成果,相关论文已被 ICML 2026 接收为 Spotlight,并已开源。真实世界中的多模态数据往往并不完整。在动作质量评价任务中,视频、光流、音频等模态能够从不同角度描述动作执行过程,但在实际采集时,传感器故障、环境噪声、隐私限制等因素都会导致模态缺失。

多模态 Agent 的记忆系统,过去很容易被理解成一个升级版 RAG:图片、图表、PDF 进来之后,先抽取内容、做 embedding、写进向量库;用户提问时,再用 query 做检索,把命中的top-k图片、文档页或图表一并塞进上下文,再交给多模态模型回答。整个过程中,所有原始模态信息都会不加选择的塞给大模型。
近日,来自KAUST生成式AI卓越中心、吉林大学、浙江大学、瑞士人工智能实验室等机构,由包括「现代人工智能之父」Jürgen Schmidhuber在内的研究者组成的团队,发布了一篇回答这个问题的研究论文。
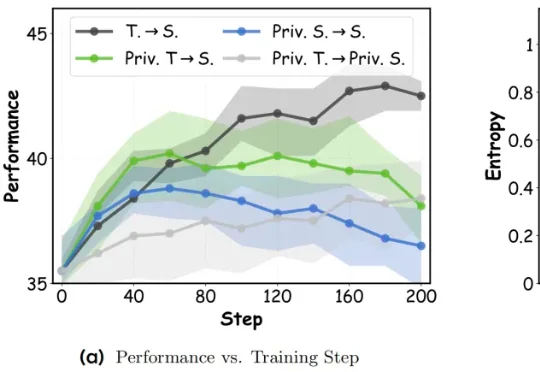
最近,来自新加坡国立大学、香港中文大学 MMLab、北京大学和京东探索研究院的研究团队提出了一种全新的在线策略蒸馏方法: DOPD (Dual On-policy Distillation) ,通过优势感知的双重蒸馏范式,成功破解了这一难题。
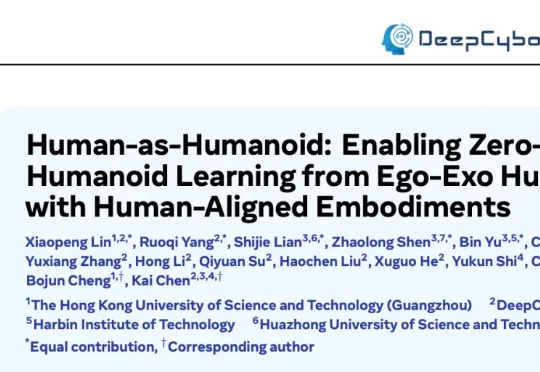
6 月 30 日,深度机智团队发布论文 Human-as-Humanoid。他们在自研拟人机器人 PrimeU 上,实现了完全没有目标任务真机示范数据的情况下,仅凭从人类视频中转换而来的动作监督,零样本完成了倒水、放环、装袋、叠杯等复杂真实操作任务。
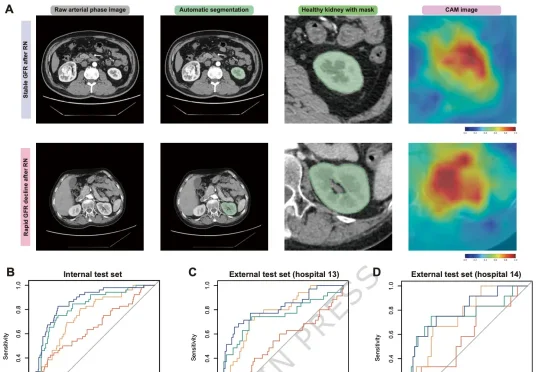
2026年5月28日,Nature通讯发表了题为 《Multimodal deep learning model for AI-based functional prognostic risk stratification in patients undergoing radical nephrectomy》 的论文。
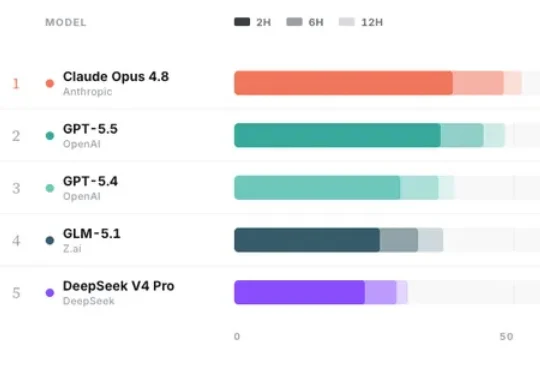
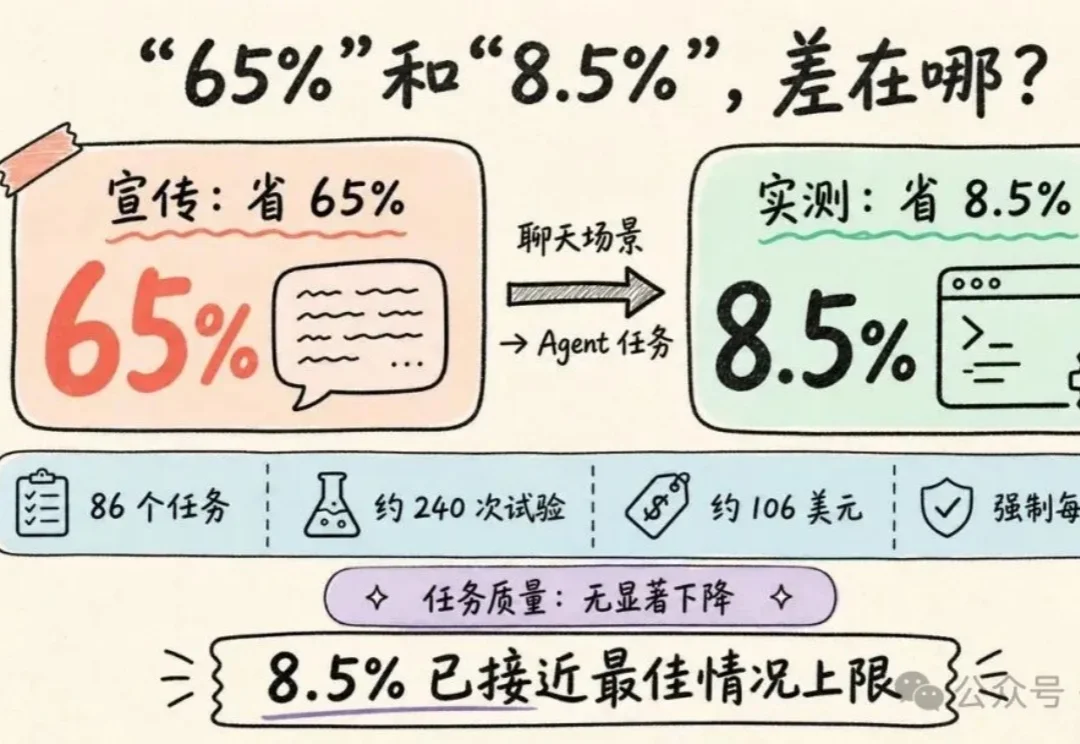
7月2日,字节 Seed 发布了一个 Agent评测项目 EdgeBench。看起来又是一个 benchmark,但它问了一个其他榜单不问的问题。EdgeBench 的切口就是把盲区里的东西放进评测,解答一个问题:把Agent扔进一个陌生环境,12小时后,你能变强多少?